WHAT |
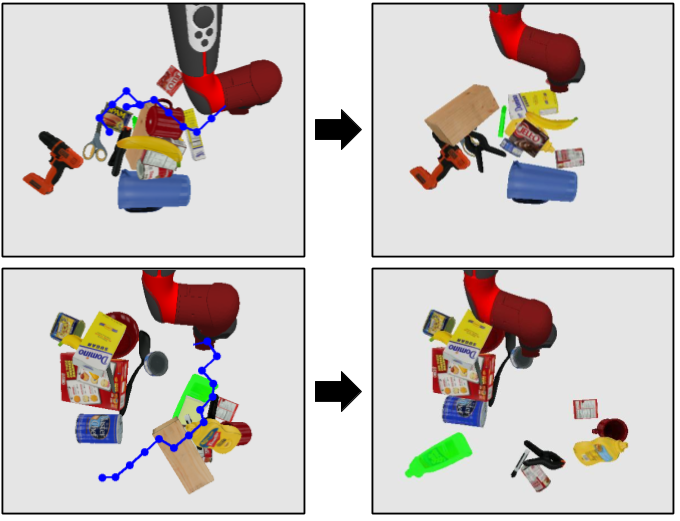
A new combination of techniques that makes learning for this challenging problem doable very efficiently. |
WHEN |
July 2019 - July 2020 |
WHO |
Andrey Kurenkov\*, Joseph Taglic\*, Rohun Kulkarni, Marcus Dominguez-Kuhne, Animesh Garg, Roberto Martín-Martín, Silvio Savarese |
WHERE |
Stanford Vision Lab |
WHY |
RL is too slow for robotics |
HOW |
|
LINKS |