WHAT |
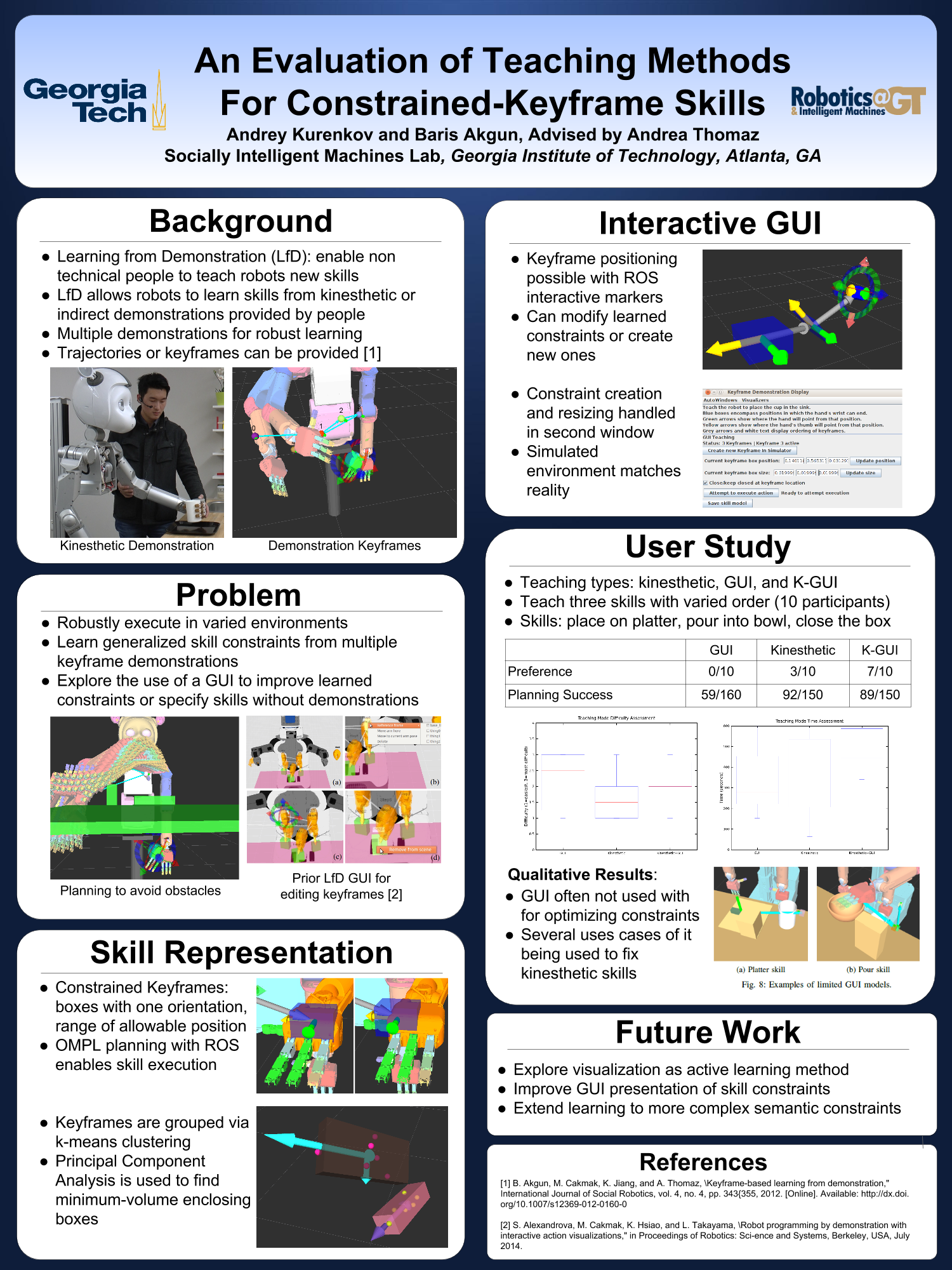
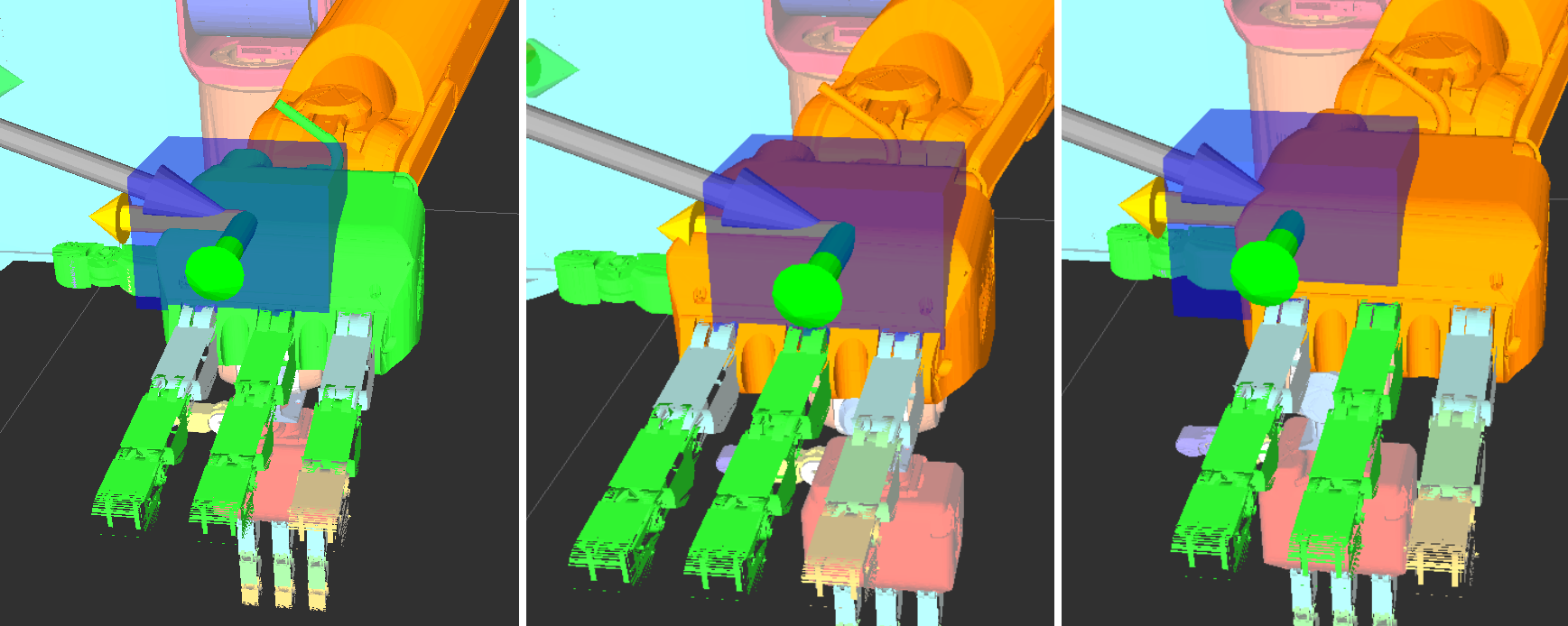
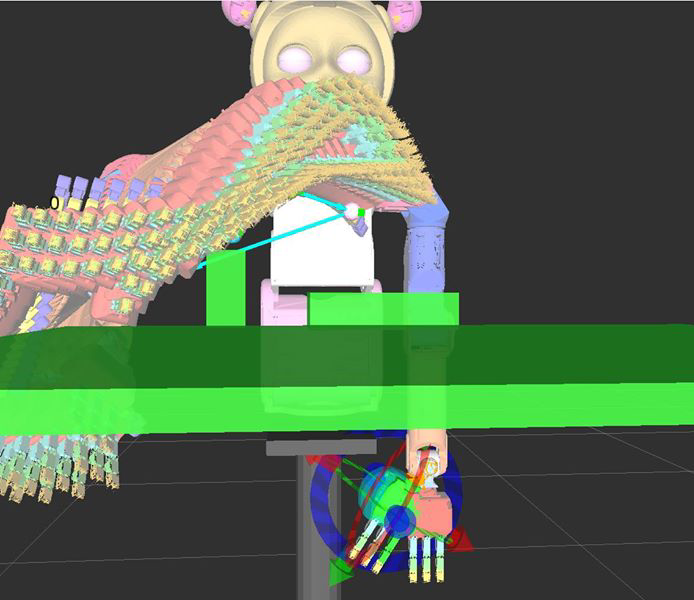
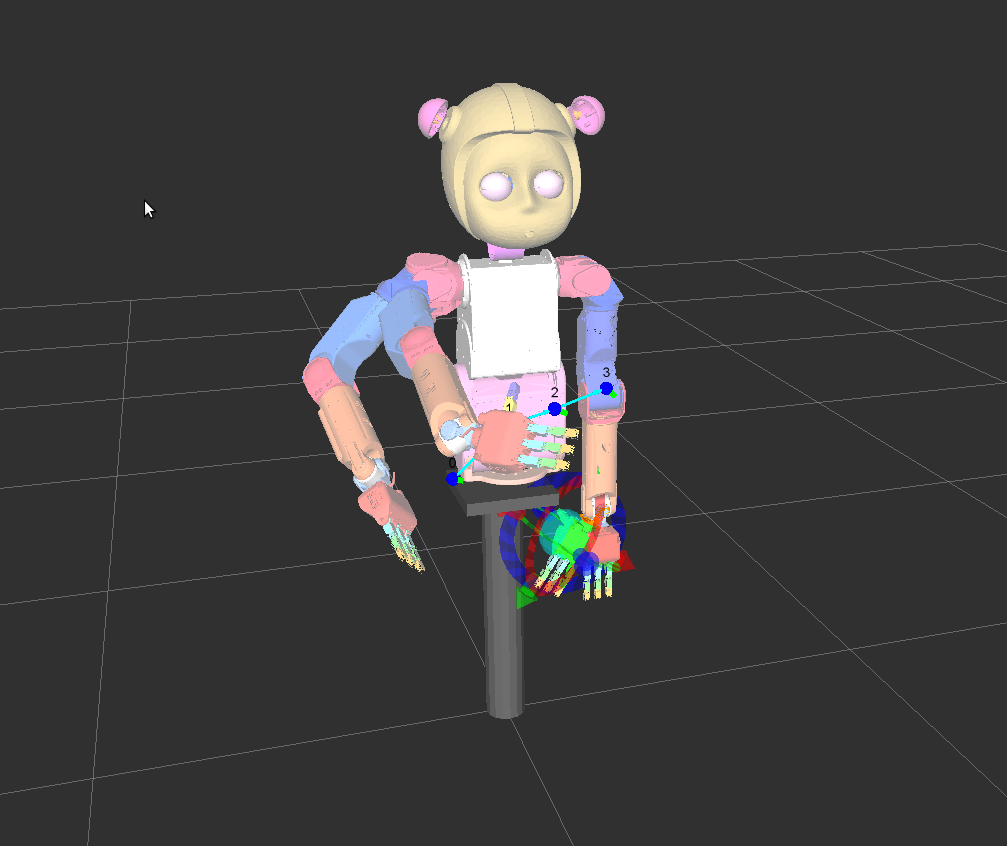
Research on the representation, teaching methods, and optimization of robust skills that are defined by constraints |
WHEN |
August 2014-May 2015 |
WHO |
Me, with much help from Baris Akgun and directed by Prof. Andrea Thomaz |
WHERE |
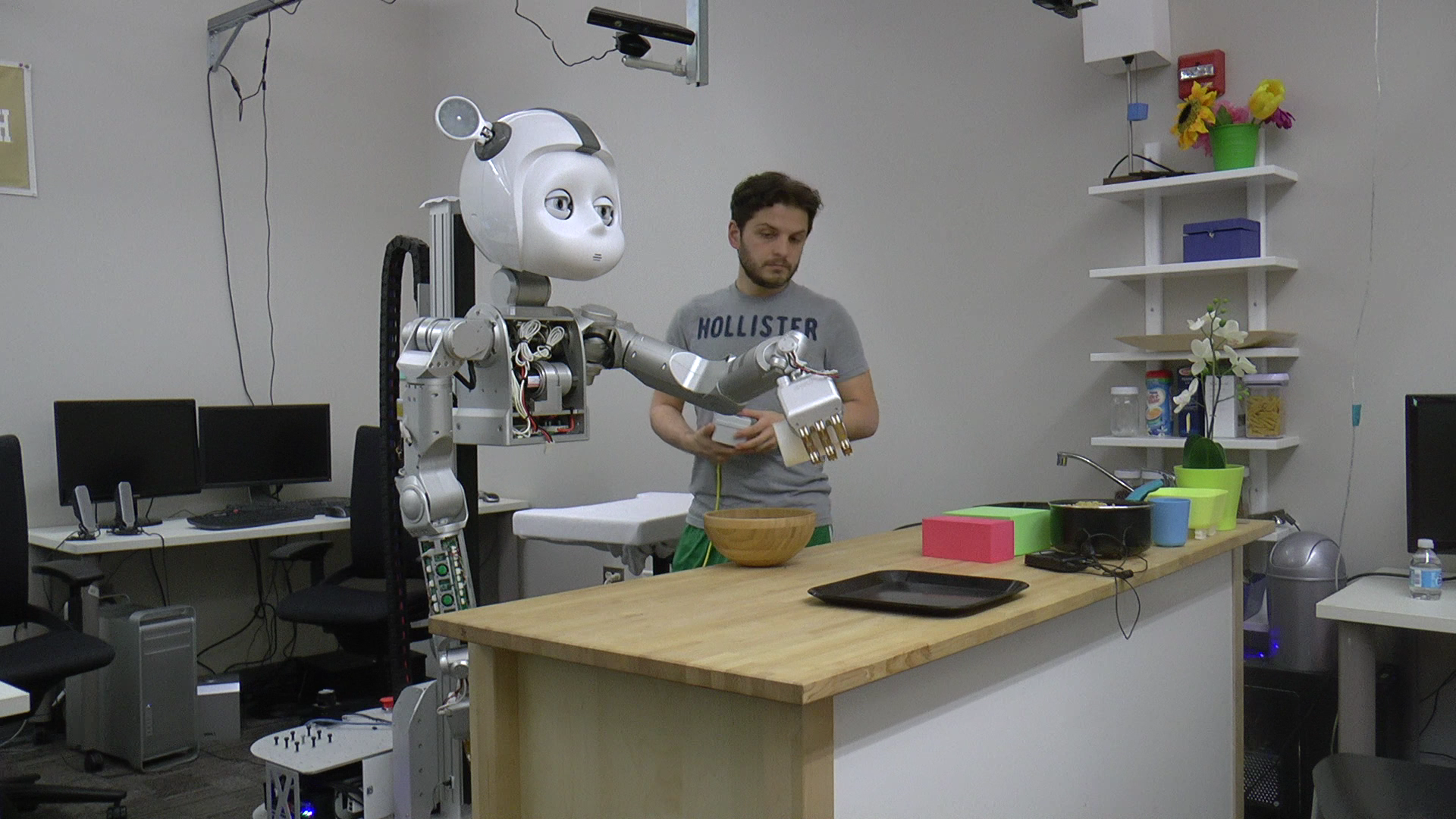
Georgia Tech, Socially Intelligent Machines lab |
WHY |
Constraint-defined skills can be used in varied environments, but it is not obvious how non-roboticists can teach such skills to robots |
HOW |
Basically, with a lot of work, particularly leading up to the paper submission. I decided to do a year long project with the ambition of being published before leaving for my summer internship with EPFL, and tentatively planned out the next year over the summer. The fall is then much of the exploration on what the research will be and the implementation of what would be needed took place, and in the final semester at Tech I actually finished the software, ran the study, and wrote the paper. My work on this project counted both for completing the Research Option at Georgia Tech and for my CS Senior Research project, and correctly so - deciding on a research direction, implementing the vast majority of the necessary software, and (most of all) running a study and completing the paper all pushed me to work extremely hard despite at times being unsure the project could be completed on time and most definitely being unsure it could lead to a publication. It must be admitted that conceptually, or in terms of algorithms, the paper is not that impressive. Still, I still think it touched on several important topics that could be exploerd to a much deeper depth. And, it got published, so it seems I am not entirely wrong! |
LINKS |
|
PICS |
|
VIDS |
|