
Publications
2023
2021

2020
2019
2018
2015
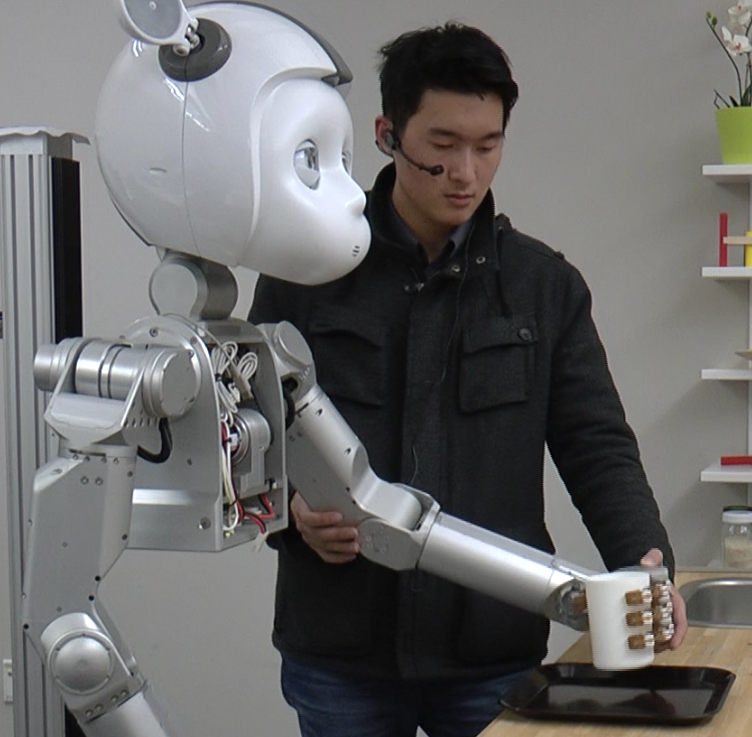
An Evaluation of GUI and Kinesthetic Teaching Methods for Constrained-Keyframe Skills
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2015
An Evaluation of GUI and Kinesthetic Teaching Methods for Constrained-Keyframe Skills
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2015