WHAT |
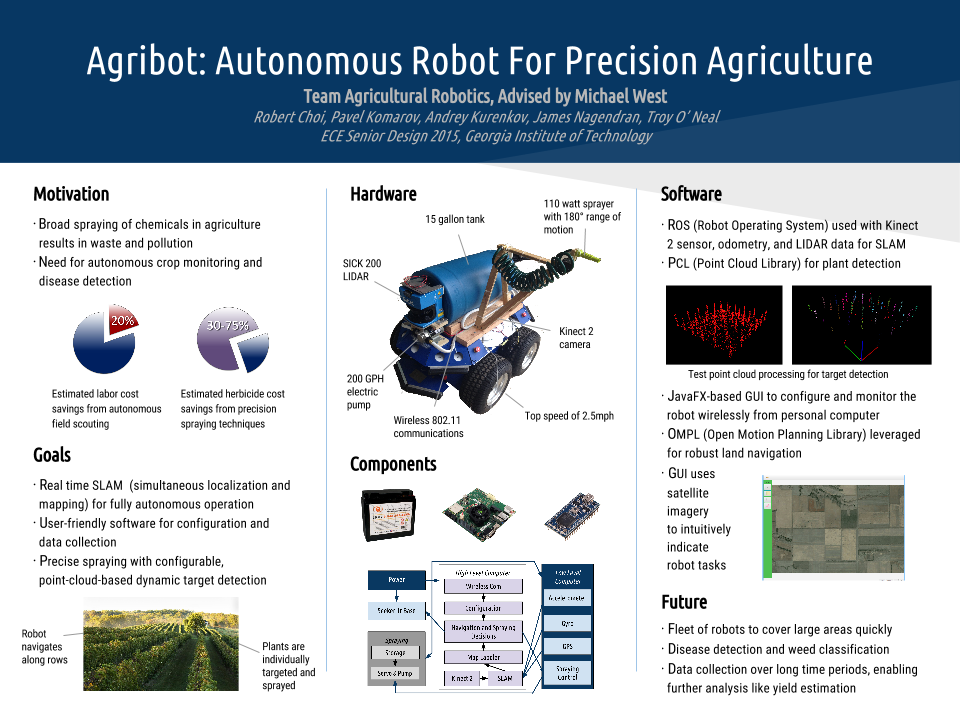
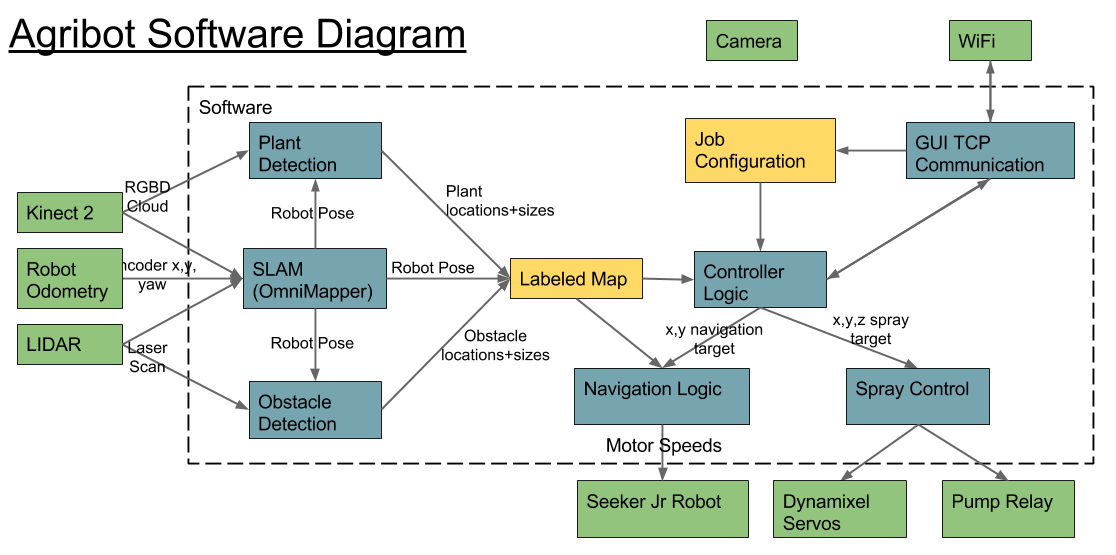
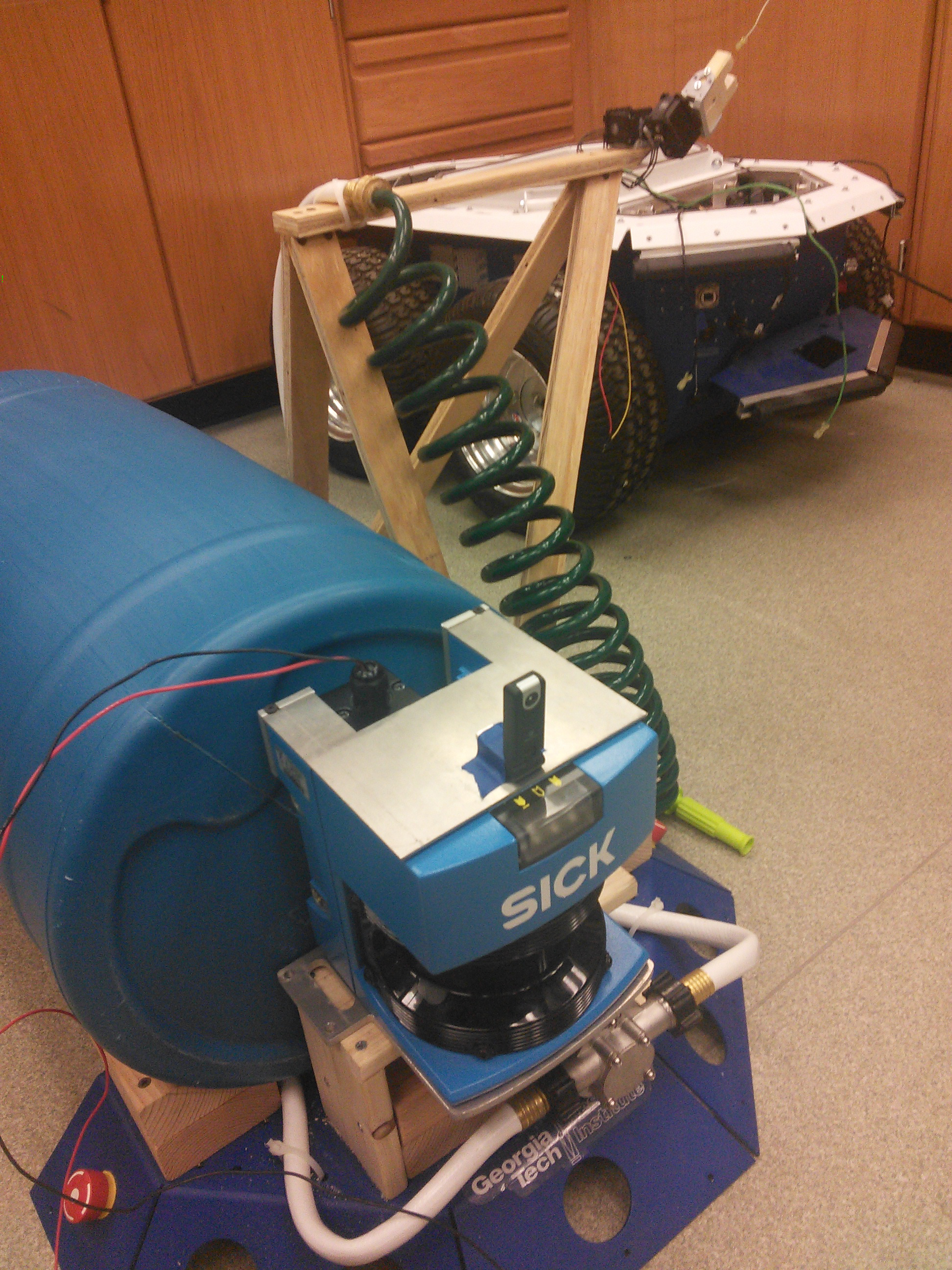
A robotic rover for autonomously mapping and spraying fields of plants |
WHEN |
August 2014-April 2015 |
WHO |
Me, Trony O'Neil, Pavel Komarov, Richard Nagendran, Robert Choi |
WHERE |
Georgia Tech, senior design for the EE degree |
WHY |
Irrigation is massively wasteful, and a more precise system would be useful. The SLAM part is honestly more exciting. |
HOW |
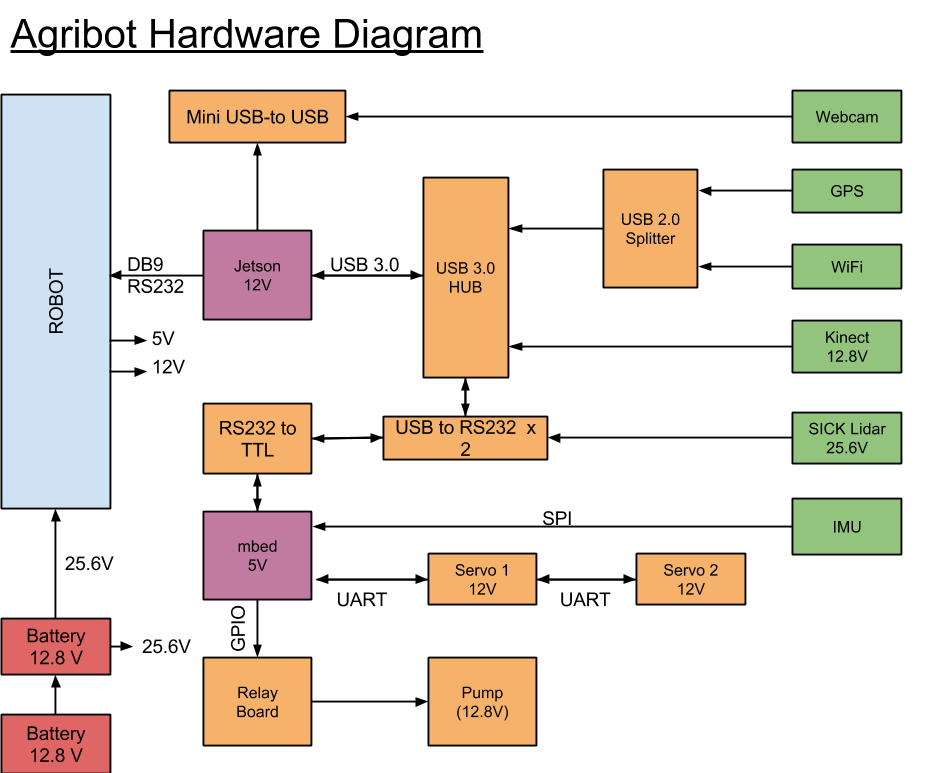
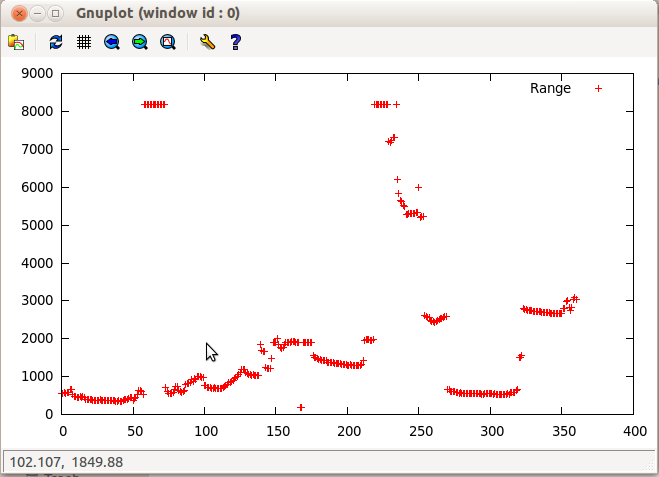
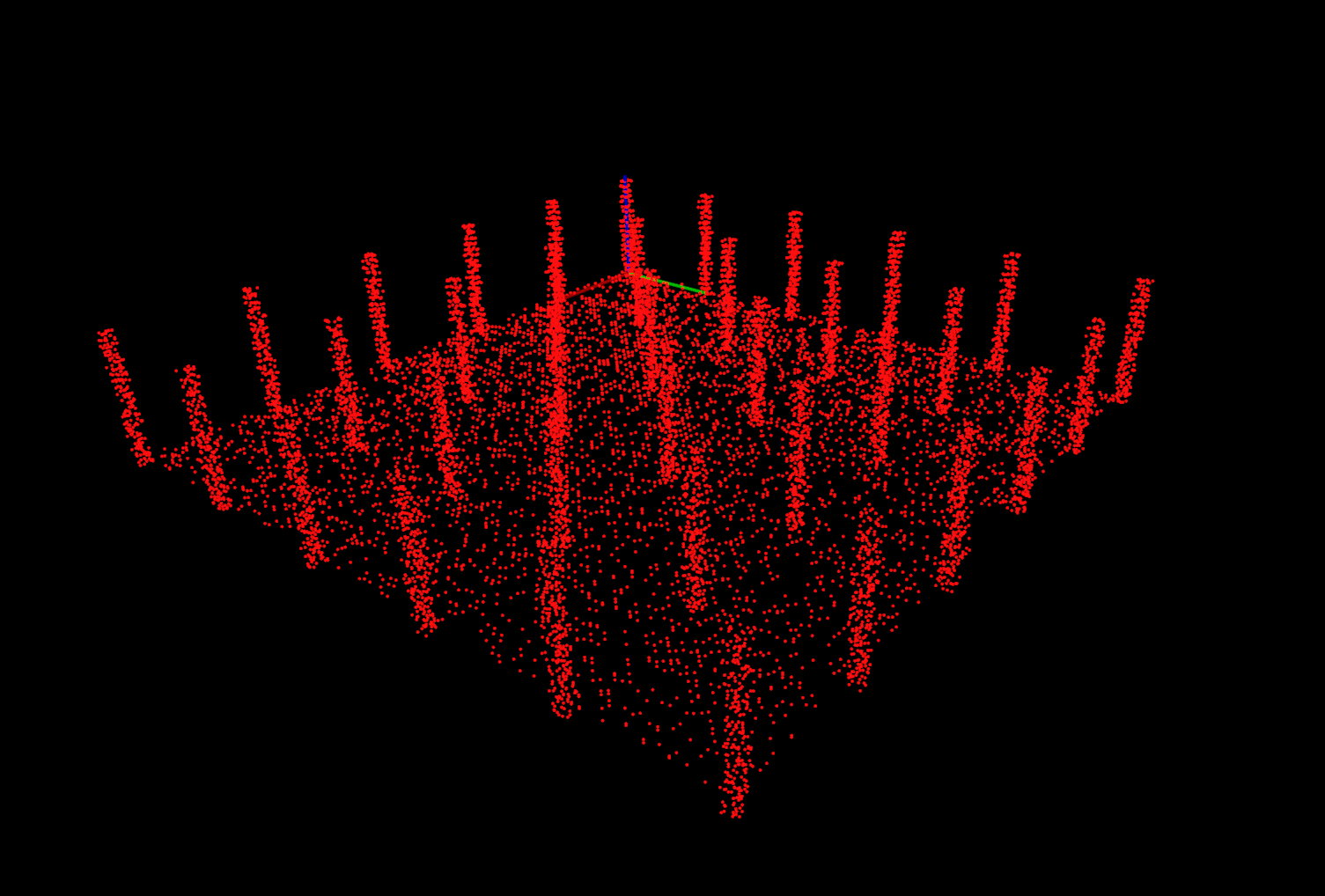
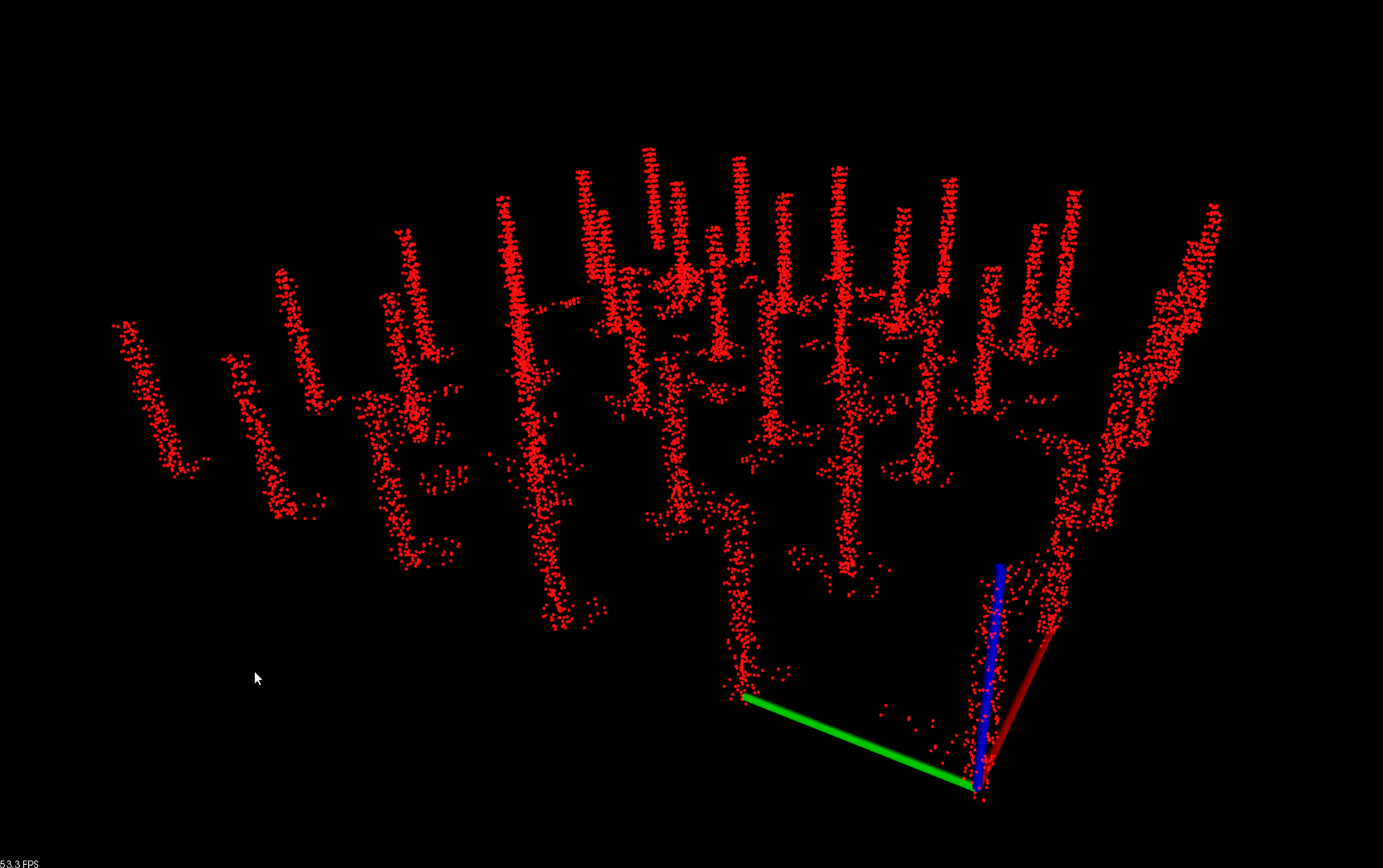
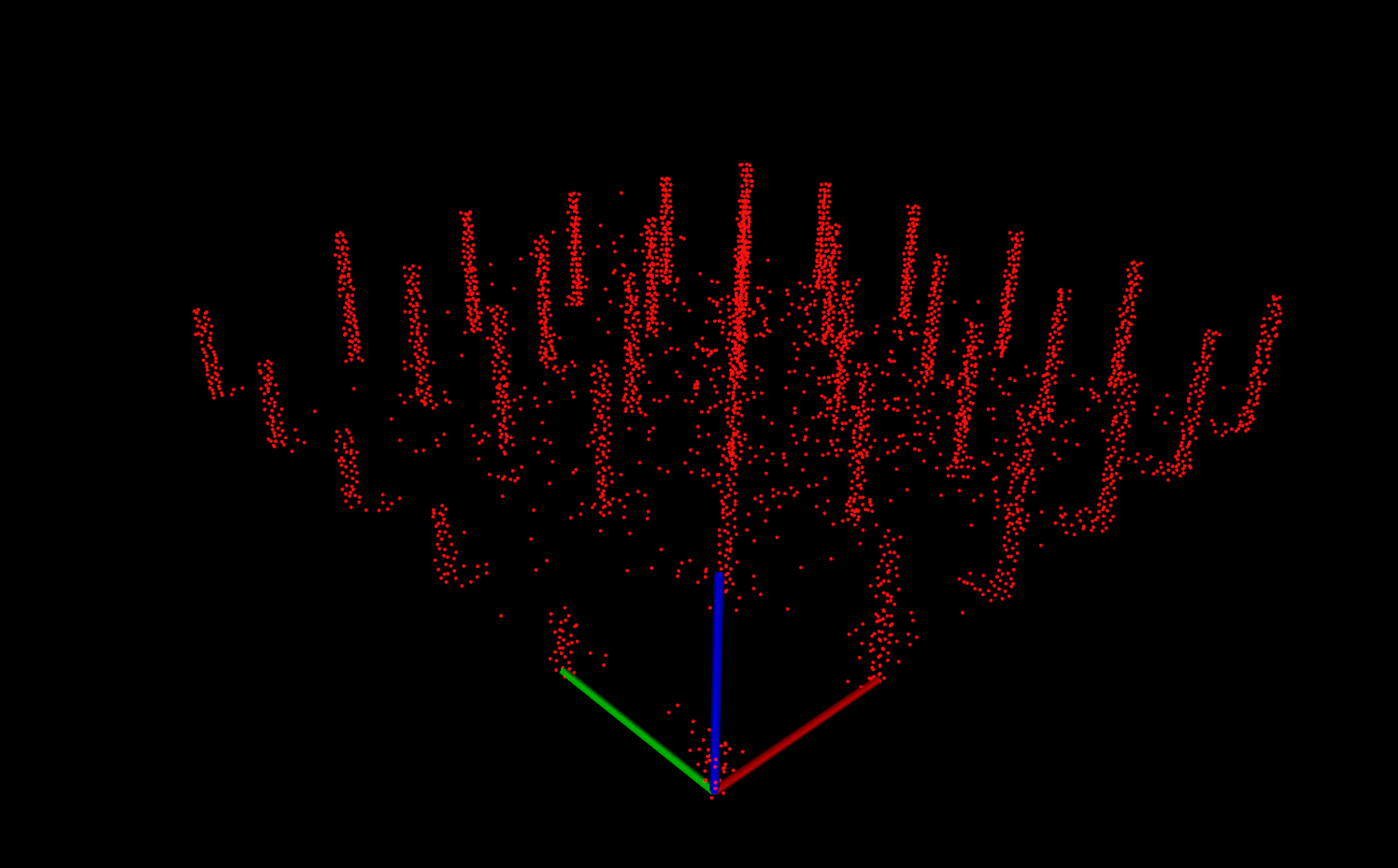
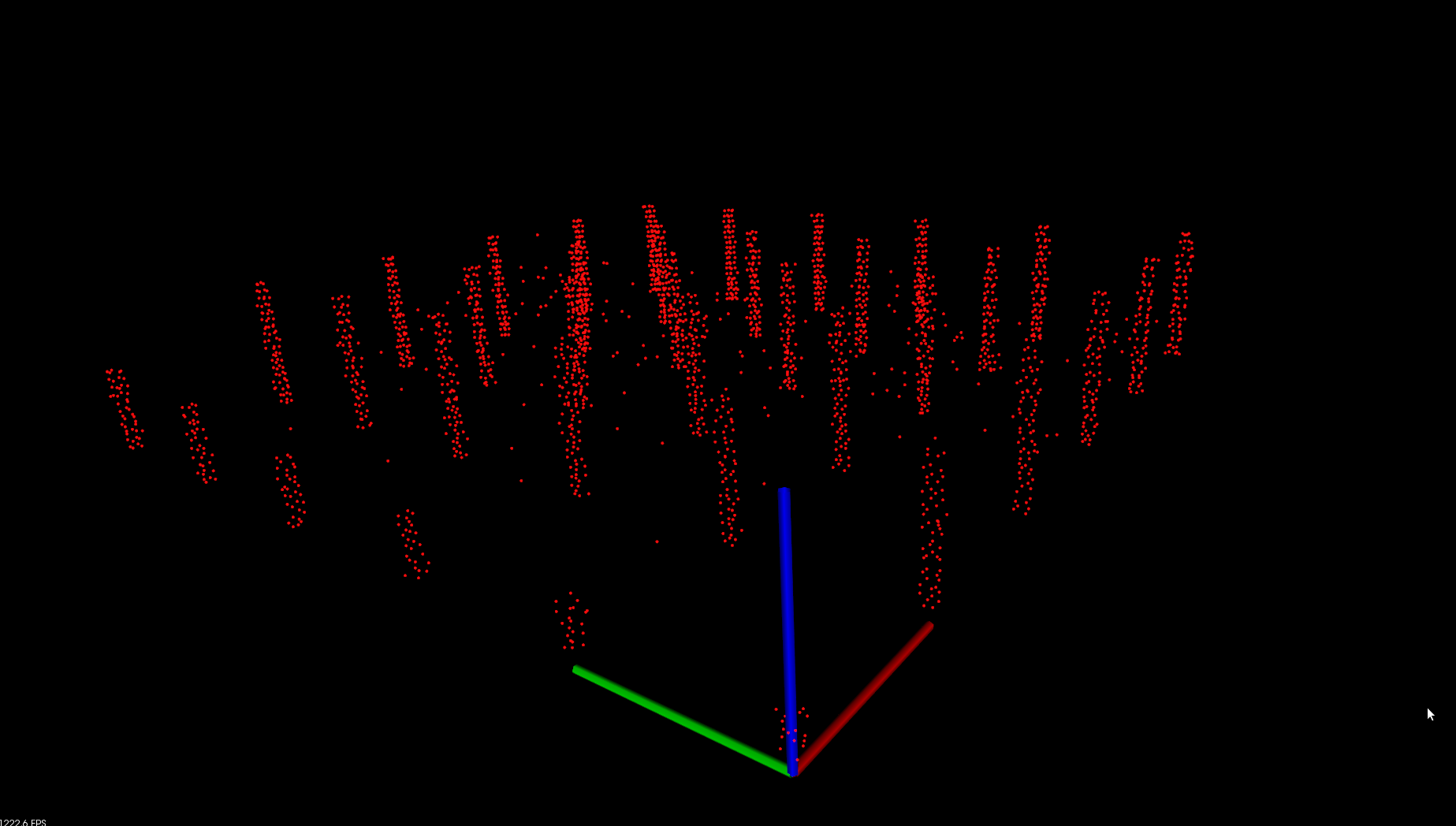
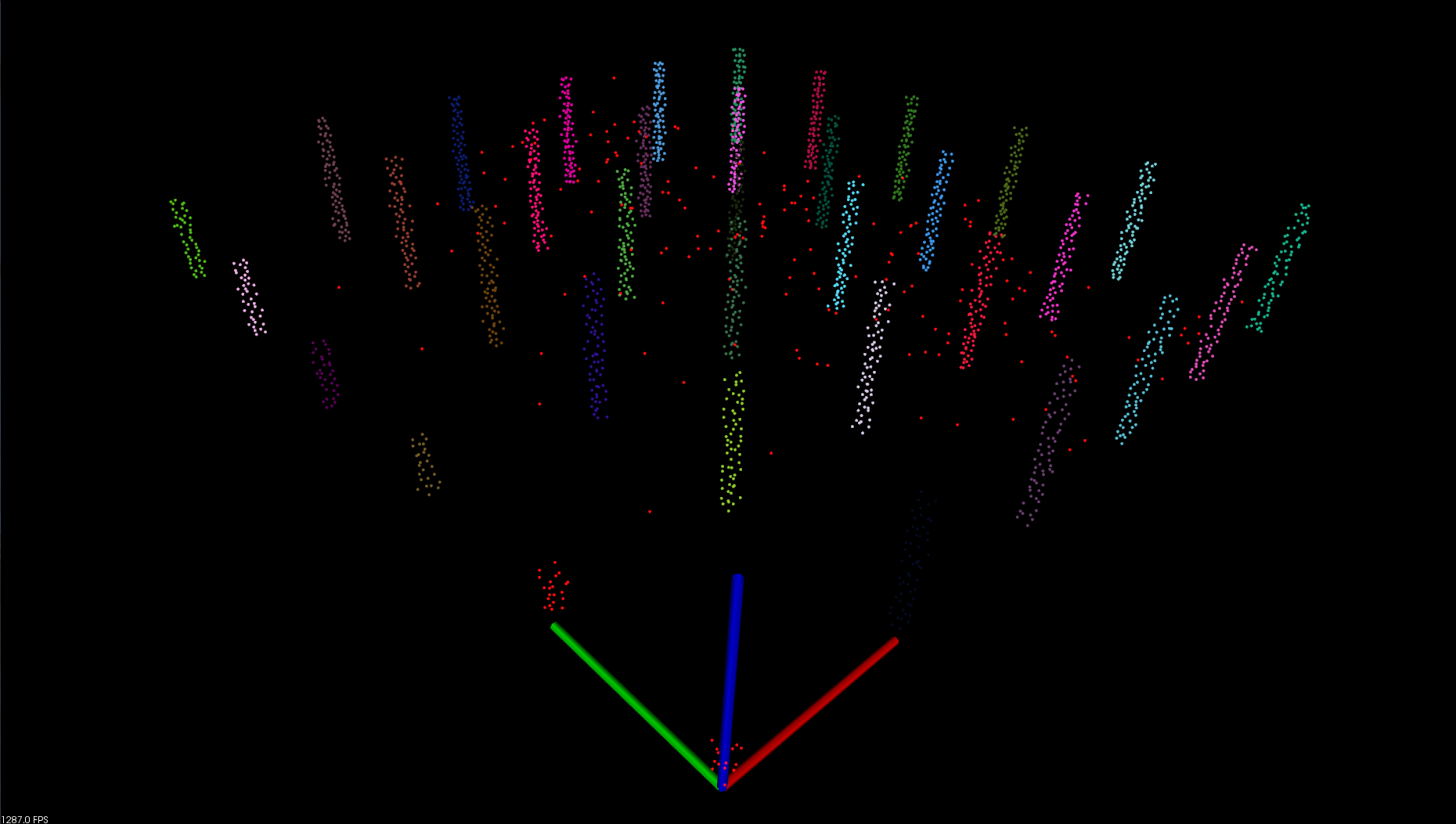
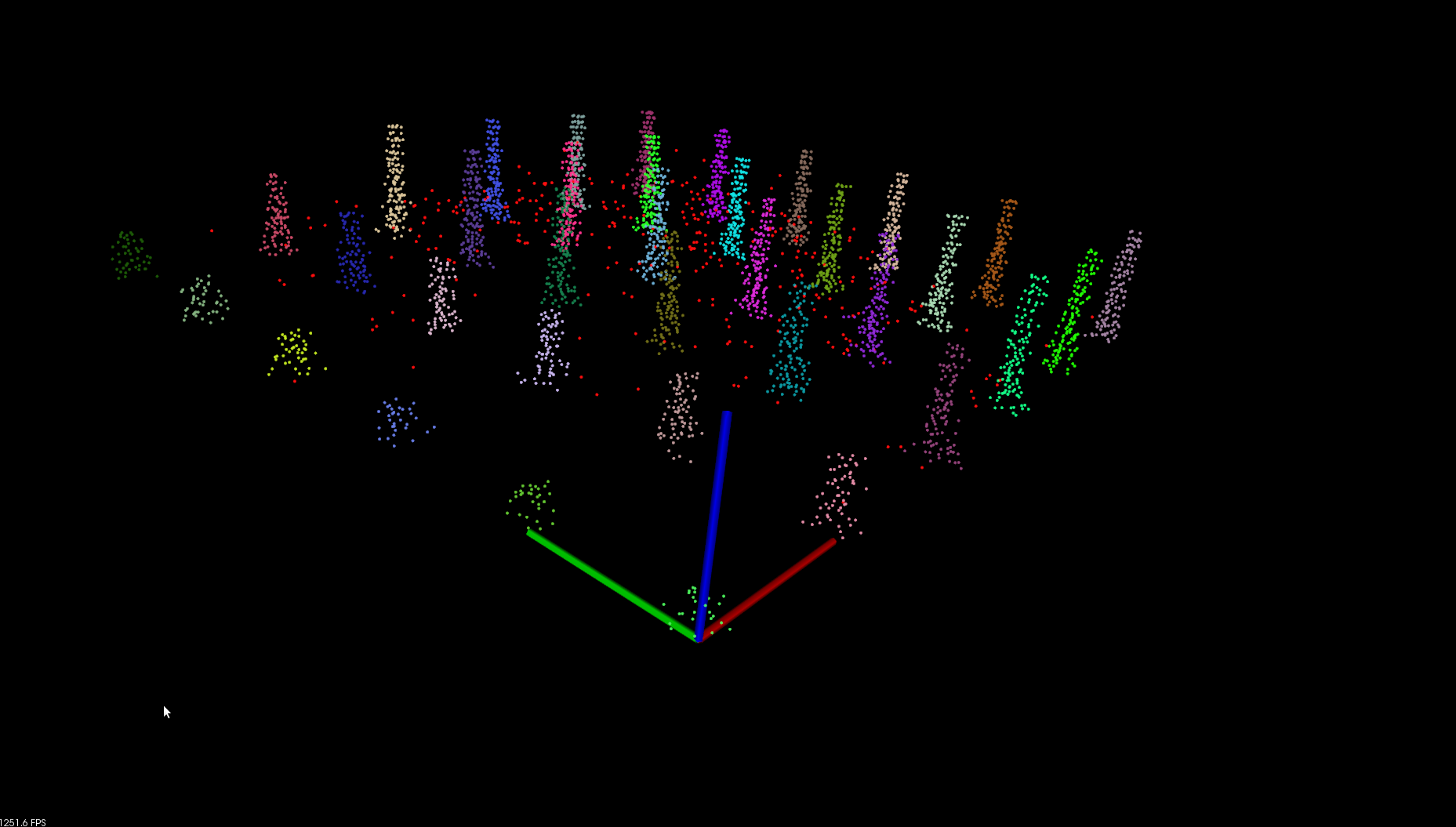
Wow, what a senior design project. Getting a roughly 30k robot rover and being tasked with putting roughy 5k of electronics and sensors on top of it. And the software! To make a self driving, autonomous mapping robot that precisely sprayed plants and gathered data with the possibility of remote control and monitoring. Seriously, what a project. What a project - a serious enough one to the point of not being able to finish, apparently. A lot was working on that Jetson TK1, intense ROS-based SLAM code with Kinect 2 and SLAM input, navigation of the robot, and so much more (the technical docs and presentation have all the juicy details) - but as happens so often we did not pull it all together in time. Still, we were close, and for a project of such ambition that means something. |
LINKS |
|
PICS |
|
VIDS |
|