WHAT |
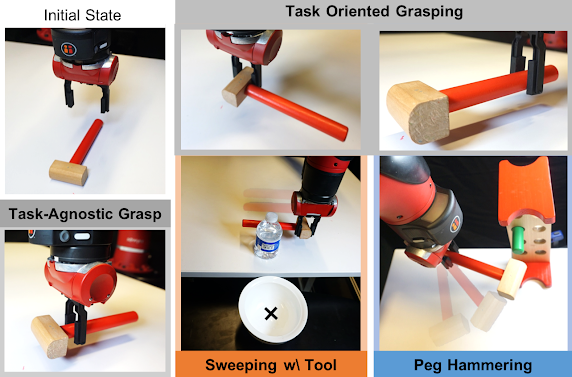
Making robots able to use tools via self-supervised learning |
WHEN |
September 2017 - February 2018 |
WHO |
Kuan Fang, Andrey Kurenkov, Animesh Garg, Viraj Mehta |
WHERE |
Stanford Vision Lab |
WHY |
Robot grasping has been revolutized via grasping, but almost no work has been done to enable robots to pick up objects with a particular for a particular use of them - that is what we did. |
HOW |
Arxiv paper explaining it all coming soon! |
LINKS |